สำนักงานคณะกรรมการส่งเสริมวิทยาศาสตร์ วิจัยและนวัตกรรม (สกสว.)
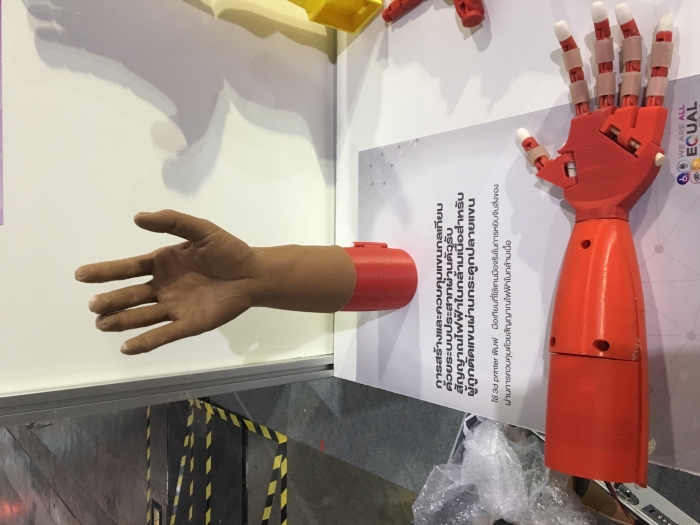
นักวิจัย สกสว. ใช้ไอเดียแขนกล ‘ไอรอนแมน’ พัฒนา ‘แพลตฟอร์มมือเทียมกลฯ’ เพื่อคนพิการ โดยมือเทียมกลขึ้นรูปจากพลาสติกด้วยเทคโนโลยีเครื่องพิมพ์ 3 มิติ ทำให้มีราคาถูก-น้ำหนักเบา-แข็งแรง ส่วนการทำงานใช้เซ็นเซอร์ตรวจจับสัญญาณไฟฟ้าในกล้ามเนื้อซึ่งถูกสั่งการจากสมอง เพื่อออกคำสั่งชุดควบคุมให้มือเทียมกล ‘กำ-แบบมือ’ ตามที่ผู้ใช้ต้องการ เล็งต่อยอดสู่แพลตฟอร์มขาเทียมกลให้คนพิการขาใช้ในอนาคต
ประเทศไทยมีคนพิการ 3.7 ล้านคน คิดเป็นร้อยละ 5.5 ของประชากรทั้งหมด และเป็นคนพิการทางการเคลื่อนไหวสูงถึงร้อยละ 49.65 ในจำนวนนี้เป็นคนพิการแขนขาขาดกว่า 50,000 ราย และมีแนวโน้มเพิ่มขึ้นอย่างต่อเนื่อง ทว่าอุปกรณ์แขนขาเทียมสำหรับคนพิการแขนขาในปัจจุบันส่วนใหญ่ยังเป็นอวัยวะเทียมเพื่อเสริมสร้างภาพลักษณ์มากกว่าที่จะขยับใช้งานได้จริงเพื่ออำนวยความสะดวกในการใช้ชีวิต
ผศ.ดร.นพรัตน์ ธรรมวงษา อาจารย์สาขาวิชาวิศวกรรมอิเล็กทรอนิกส์และระบบอัตโนมัติ มหาวิทยาลัยราชภัฏอุดรธานี และทีมวิจัย พัฒนา ‘โครงการสร้างมือเทียมกลควบคุมผ่านตัวรับสัญญาณไฟฟ้าในกล้ามเนื้อ’ ภายใต้การสนับสนุนของสำนักงานคณะกรรมการส่งเสริมวิทยาศาสตร์ วิจัยและนวัตกรรม (สกสว.)
ผศ.ดร.นพรัตน์ กล่าวว่า ปัจจุบันหลายสถาบันทั่วโลกมุ่งพัฒนามือเทียมกลที่ตอบสนองการเคลื่อนไหวแก่คนพิการ แต่ยังมีราคาที่สูงมาก ยากต่อการเข้าถึง ทีมวิจัยจึงตั้งโจทย์ว่าทำอย่างไรที่จะช่วยพัฒนามือและขาเทียมกลที่สามารถขยับจับอุปกรณ์ต่างๆ ได้จริง เพื่อช่วยให้คนพิการใช้ชีวิตประจำวันด้วยตนเอง โดยในงานวิจัยครั้งนี้ได้พัฒนาต่อยอดจากผลงานของกลุ่มนักศึกษาสาขาวิชาวิศวกรรมอิเล็กทรอนิกส์และระบบอัตโนมัติ ที่ได้ทำชิ้นงานเกี่ยวกับ ‘ไอรอนแมน’ แขนกลยอดมนุษย์ในภาพยนตร์ฮอลลีวูด ซึ่งแขนกลเวอร์ชั่นแรกนี้ขึ้นรูปด้วยเครื่องพิมพ์ 3 มิติ และใช้การควบคุมแบบระบบไร้สาย แต่ยังไม่สามารถเชื่อมต่อกับการสั่งการของมนุษย์ได้ จึงสนใจต่อยอดให้เชื่อมต่อการสั่งการจากสัญญาณไฟฟ้าในกล้ามเนื้อของคนพิการได้จริง
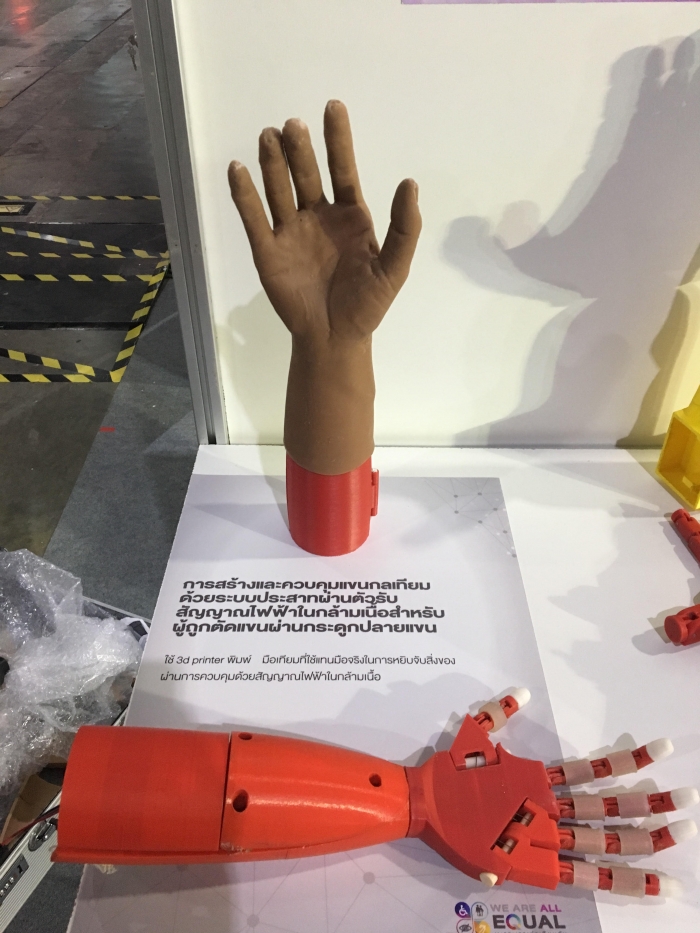
“การวิจัยมือเทียมกล ทีมวิจัยได้พัฒนา 2 ส่วน คือ 1. การสร้างแพลตฟอร์มสำหรับการพัฒนากายอุปกรณ์ในการพิมพ์มือเทียมกลจากเครื่องพิมพ์ 3 มิติ โดยทีมวิจัยออกแบบและใช้เครื่องพิมพ์ 3 มิติ พิมพ์มือเทียมกลให้มีความหลากหลายเหมาะกับคนพิการได้แล้ว 10 รูปแบบ (ออกแบบมือเทียมกลฯ ตั้งแต่ข้อมือ กลางมือ ตอข้อศอก และเหนือข้อศอก โดยแบ่งข้างซ้ายกับขวารวมเป็น 10 แบบ) จากเคสคนพิการ 12 ราย ซึ่งนำไปใช้กับคนพิการได้เลย และ 2. การสร้างแพลตฟอร์มสัญญาณควบคุมด้วยการใช้เซ็นเซอร์ตัววัดสัญญาณไฟฟ้าในกล้ามเนื้อของคนพิการ เป็นการสร้างแพลตฟอร์มใหม่ที่ทำหน้าที่ตรวจจับสัญญาณสั่งการจากสมอง เป็นสัญญาณไฟฟ้าผ่านกล้ามเนื้อแขน
“การทำงานของมือเทียมกล คือเมื่อคนพิการใส่มือเทียมกลที่ออกแบบไว้ เซ็นเซอร์ตรวจสัญญาณไฟฟ้าที่กล้ามเนื้อ หรือ Electromyography Muscle Sensor ซึ่งเชื่อมต่อกับมือเทียมกล จะทำการตรวจชุดสัญญาณไฟฟ้าที่ถูกสั่งการจากสมอง และนำมาสั่งการชุดควบคุมของมือเทียมกลให้ทำงาน เช่น ‘กำ-แบบ’ มือ ซึ่งหวังว่าจะเป็นประโยชน์ช่วยยกระดับคุณภาพชีวิตคนพิการแขนให้ดำเนินชีวิตได้ดีขึ้น”
ผศ.ดร.นพรัตน์ กล่าวว่า ข้อจำกัดของมือเทียมกลตอนนี้คือ สามารถสั่งการได้ฟังก์ชั่นเดียวคือ การกำ-แบมือ เนื่องจากกล้ามเนื้อของคนพิการแต่กำเนิดแทบไม่เคยถูกพัฒนามาก่อน หรือแม้แต่คนพิการอุบัติเหตุแขนขาดส่วนใหญ่ ไม่มีมัดกล้ามเนื้อที่จะทำให้เกิดสัญญาณไฟฟ้าที่หลากหลายได้ ตัวอย่างการพัฒนามือเทียมกลครั้งนี้ ทีมวิจัยได้ติดตั้งเซ็นเซอร์เพื่อตรวจจับสัญญาณไฟฟ้าในกล้ามเนื้อคนพิการถึง 8 ตัว แต่ตรวจจับสัญญาณได้เพียงจุดเดียวเท่านั้น จึงออกแบบฟังก์ชั่นการทำงานได้เพียงแบบเดียว ซึ่งทีมวิจัยเลือกเปลี่ยนสัญญาณไฟฟ้าให้สั่งการเป็นการกำหรือแบบมือ เพื่อกำหรือวางสิ่งของ ซึ่งเป็นประโยชน์ในการใช้ชีวิตประจำวันที่สุด แต่หากในอนาคตคนพิการสามารถพัฒนากล้ามเนื้อให้ทำงานได้มากขึ้น เซ็นเซอร์ตรวจจับสัญญาณไฟฟ้าได้มากขึ้น ก็อาจจะพัฒนาให้สั่งการทำงานแยกนิ้วทั้ง 5 นิ้ว แยกการทำงานฟังก์ชั่นอื่นเหมือนคนปกติได้ เช่น การขยับนิ้ว เป็นต้น
“นอกจากนี้แล้ว ทีมวิจัยยังได้พัฒนาชุดเซ็นเซอร์แบบเบ็ดเสร็จให้คนพิการใช้งานได้ง่ายขึ้น ทำให้สามารถสวมมือเทียมกลนี้ใส่แขนได้เลย โดยเสียบสวิตซ์กับมอเตอร์ก็ทำงานได้ทันที ไม่ต้องเขียนโค้ดอะไรเพิ่มเติม ช่วยให้นักกายอุปกรณ์ลดขั้นตอนที่ยุ่งยากในการต่ออุปกรณ์ สำหรับการพัฒนาต่อยอดมือเทียมกล ในอนาคตทีมวิจัยเตรียมออกแบบไมโครคอนโทรลเลอร์ให้เซ็นเซอร์และชุดควบคุมอยู่ด้วยกัน และออกแบบแพลตฟอร์มระบบการรู้จำว่ามือเทียมกลสำหรับคนพิการแขนต้องมีฟังก์ชั่นการทำงานอย่างไรบ้าง ที่สำคัญทีมวิจัยยังมองไปถึงขั้นการพัฒนาปัญญาประดิษฐ์ หรือ AI มือเทียมกลเฉพาะบุคคลด้วย เนื่องจากรูปแบบมือเทียมกลกับรูปแบบของสัญญาณไฟฟ้าในกล้ามเนื้อของแต่ละบุคคลไม่เหมือนกัน”
อย่างไรก็ดี สำหรับงานวิจัยในแพลตฟอร์มแรก คือการพิมพ์มือเทียมกลด้วยเครื่องพิมพ์ 3 มิติ ทีมวิจัยได้เริ่มขยายผลติดตั้งใช้งานจริงที่โรงพยาบาลสิรินธร จังหวัดขอนแก่น นอกจากนี้เตรียมวางแพลตฟอร์มให้แก่โรงพยาบาลสมเด็จพระบรมราชเทวี ณ ศรีราชา จังหวัดชลบุรี รวมทั้ง โรงพยาบาลค่ายประจักษ์ศิลปาคม จังหวัดอุดรธานี ด้วย
ผศ.ดร.นพรัตน์ กล่าวว่า เรามุ่งหวังช่วยเปลี่ยนมือเทียมแบบเดิม ซึ่งเป็นมือเทียมแบบแข็งๆ หรือขาของผู้พิการที่เป็นแบบเหล็กให้เป็นมือเทียมกลที่ออกแบบขึ้น ซึ่งเป็นวัสดุที่พิมพ์จากพลาสติกมีค่าใช้จ่ายประมาณ 1,000-2,000 บาท (ไม่รวมตัวชุดควบคุมที่สั่งการให้มือขยับได้) ใช้เวลาในการเปลี่ยนเพียง 1-2 วัน และยังปรับขนาดให้เหมาะสมกับผู้ใช้ได้ อีกทั้งหากคนพิการที่สนใจใส่เซ็นเซอร์ควบคุม ทีมวิจัยสามารถผลิตได้ในราคาไม่ถึงหมื่นบาท ซึ่งมีราคาถูกกว่าการนำเข้าจากต่างประเทศที่มีราคาหลักแสนบาท
“ไม่เพียงมือเทียมกล ตอนนี้ทีมวิจัยมองไปถึงการพัฒนาเซ็นเซอร์ให้ขาเทียมด้วย เพราะขณะนี้สามารถใช้เทคโนโลยีเครื่องพิมพ์ 3 มิติ ออกแบบพิมพ์เบ้าอวัยวะขาเทียม ให้มีน้ำหนักเบา แต่ยังคงความแข็งแรงทนทานได้เหมือนอวัยวะขาจริงที่ใช้งานได้ โดยขณะนี้อยู่ระหว่างการทดสอบเซ็นเซอร์และฟังก์ชั่นการทำงานของขาเทียมกล หวังว่าจะเป็นการต่อยอดนวัตกรรมที่จะช่วยคนพิการขาได้มากขึ้น”
สำหรับ โรงพยาบาล ผู้ประกอบการ นักกายอุปกรณ์ ที่สนใจเทคโนโลยีมือเทียมกล สามารถติดต่อได้ที่ 0985985955 หรือ อีเมล nopthamma@gmail.com






 ค้นหาทุกอย่างในเว็บครูบ้านนอก :
ค้นหาทุกอย่างในเว็บครูบ้านนอก :